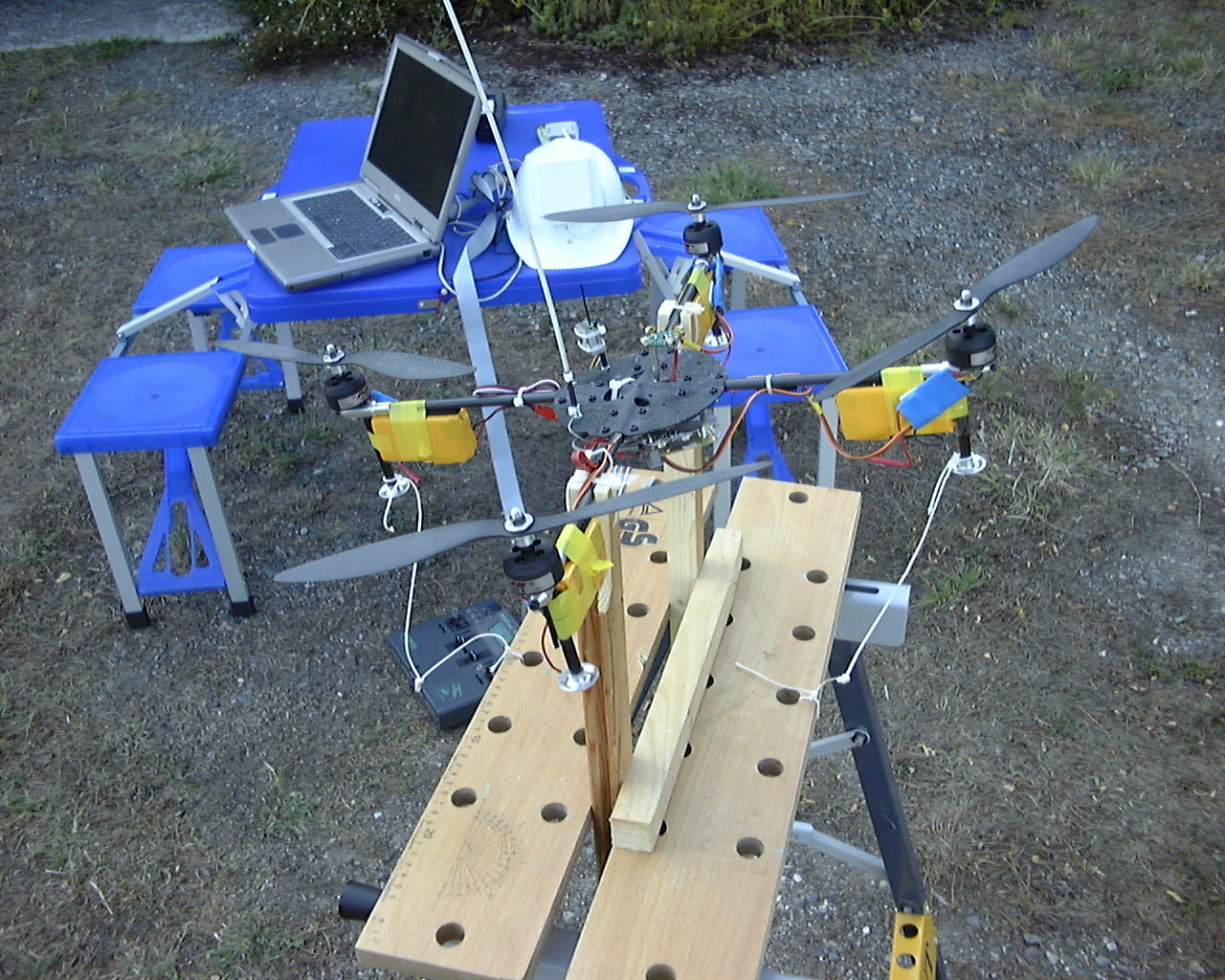
From: antoine . drouin Subject: [Paparazzi-devel] Cam4 initial testing report Date: Sun, 25 Jul 2004 20:31:36 +0200 User-agent: Internet Messaging Program (IMP) 3.2.4 Hi everybody We have mounted the Paparazzi autopilot in the Cam4, a quadrirotors helicopter build at Supaero. We have used this bench to run initial testing. http://www.nongnu.org/paparazzi/images/cam4_bench.jpg We were able to make it hold an attitude on one axe (P controller on infrared only). We witnessed worrying oscillations under big disturbance conditions (when I would hit it strong or realease it at 45 degres). I think we should try to measure and calibrate the response curve of the motor controllers. It would probably help to have a rpm feedback. Anybody's got an idea on how to do a quick quad-tacho ? The motors are brushless, so I think that sensing the voltage on one motor wire could be a solution I don't have enough comparator/counter on the mega128 do to that here. Maybe one (four???) external frequency to voltage converter - or a microcontroller-based solution connected by SPI ? I really hope that we will not discover that these controllers are to slow. I think we will have problem with starting time too. I'd appreciate any comment/idea. Antoine
Copyright 2004 http://lists.nongnu.org/mailman/listinfo/paparazzi-devel