
PIXHAWK
Project Information
The PIXHAWK project was started by Lorenz Meier as his ETH Excellence Scholarship project in 2009 and was initially meant to include just very few students. It however evolved during the first six months into a full-scale student team project with 8-14 students per semester. Our project is now developing since several semesters a robotics framework for micro air vehicles. The hardware and travel expenses are sponsored by the Computer Vision and Geometry Lab [ http://www.cvg.ethz.ch/ ], with additional travel expenses support by the Rektorat [ http://www.rektorat.ethz.ch/ ] of the swiss ETH Zurich [ http://www.ethz.ch/ ].
This page provides a brief summary of our project. These pages are highly recommend for additional information about the project:
Goals
This prototype and platform are developed to test computer vision approaches
on micro air vehicles (MAV [ http://pixhawk.ethz.ch/micro_air_vehicle/start ]),
which are miniature unmanned air systems (UAS). To add some motivation, our student
team participates each year in the IMAV competition. We are not only using a number
of open-source projects for our work, but also releasing our hard- and software
under an open source license (released code [ http://github.com/pixhawk ]).
Computer Vision
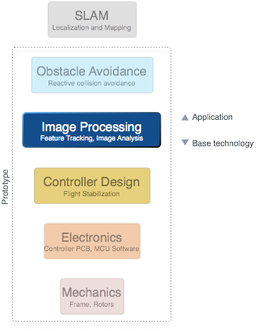
The focus of this project is to use computer vision on micro air vehicles (MAVs) in order to enable autonomous action. Our goal is to do all image processing onboard, leading to full autonomy. The computer vision draws from base technology such as the mechanical platform or the attitude estimation of the IMU. At the same time, it provides data to more complex tasks such as obstacle avoidance or simultaneous localization and mapping (SLAM [ http://en.wikipedia.org/wiki/Simultaneous_localization_and_mapping ]).
To reach this goal, several computer vision problems have to be tackled:
These tasks are quite different regarding the feasible approaches and will likely require parallel image processing pipelines.
The Computer Vision and Geometry [ http://www.cvg.ethz.ch/ ] lab at ETH Zurich
has experience in realtime computer vision, currently mostly in form of general-purpose
GPU programming (GPGPU [ http://en.wikipedia.org/wiki/GPGPU ]). We are trying to
apply these techniques to the embedded world.
PIXHAWK Systems
Please find detailed information on each platform on these pages.
Micro Air Vehicles
We are currently working with two micro air vehicles [ http://pixhawk.ethz.ch/micro_air_vehicle/start ]. Both are custom designs done by the PIXHAWK team.
Electronics
Our electronics is a modular system which can be used on small (30 cm rotor diameter) to large (1 m width) systems.
Software
We are using the same software on all our flying platforms. It is designed for embedded Linux and can be run on a Gumstix Overo COM or any standard Ubuntu Linux.
Ground Control Station
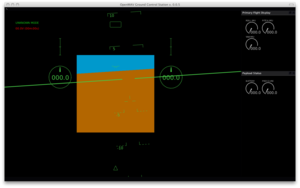
The groundstation application we use was designed at ETH specifically for MAVs. An unmanned air system (UAS [ http://en.wikipedia.org/wiki/Unmanned_Aircraft_System ]) includes by definition an operator control unit. It supports the vehicle control as well as sensor readout and close monitoring. It is written in C++ and is cross-platform, running under Linux, Windows and Mac Os. The picture below shows concept art for the user interface design. Images of the real implementation will be available soon.
Last modified: 2010/08/25 15:50 by lm
Copyright 2010 http://pixhawk.ethz.ch/