Introducing the PX4 autopilot system
DIYDrones.com
July 25, 2012
The PX4 team is pleased to announce early availability of the PX4 autopilot platform, with hardware available immediately from 3D Robotics.
The platform is a low cost, modular, open hardware and software design targeting high-end research, hobby and industrial autopilot applications.
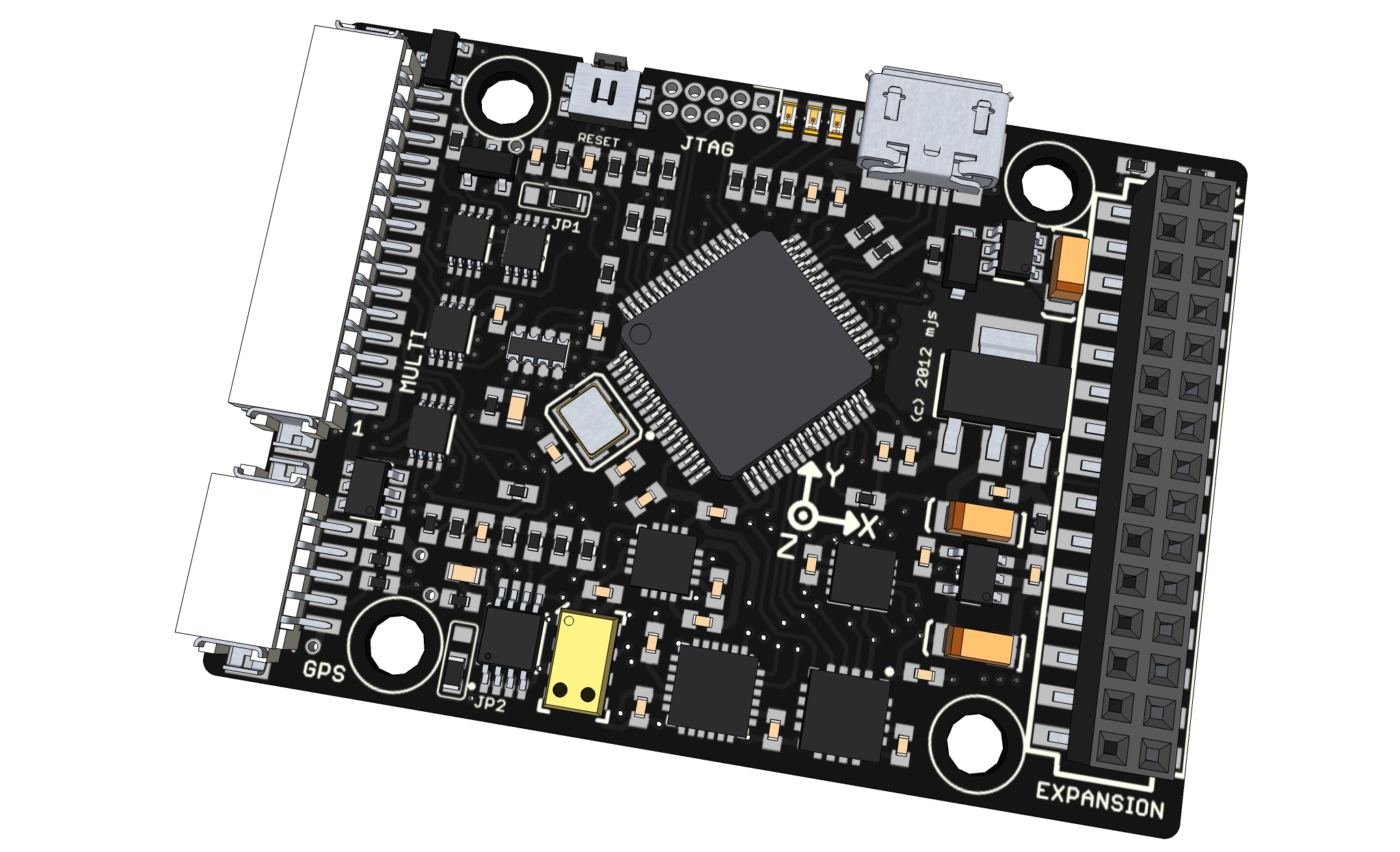
PX4 is an expandable, modular system comprising the PX4FMU Flight Management Unit [ https://pixhawk.ethz.ch/px4/modules/px4fmu ] (autopilot) and a number of optional interface modules.
The PX4FMU autopilot features include:
Expansion modules available at release include:
As an open hardware design, third-party and DIY expansion modules can be easily developed for specific applications, and more PX4 modules are in development.
In addition to the versatile hardware platform, PX4 introduces a sophisticated, modular software environment built on top of a POSIX-like realtime operating system. The modular architecture and operating system support greatly simplify the process of experimenting with specific components of the system, as well as reducing the barriers to entry for new developers.
Adding support for new sensors, peripherals and expansion modules is straightforward due to standardized interface protocols between software components. Onboard microSD storage permits high-rate logging and data storage for custom applications. MAVLink protocol support provides direct integration with existing ground control systems including QGroundControl and the APM Mission Planner.
Pricing of the PX4 components reflects more than a year of careful development and a strong commitment from our manufacturing partner.
This release is targeted at early adopters and developers looking for a more capable platform than existing low-cost autopilots. With more than an order of magnitude more processing power and memory compared to popular 8-bit autopilot platforms, PX4 is exceptional value for money and provides substantial room for future growth.
For more information about the PX4 autopilot platform, visit the project website at http://pixhawk.ethz.ch/px4/
PX4 modules can be purchased from our manufacturing partner, 3DRobotics.
by Chris Anderson [ http://diydrones.com/profile/zlitezlite ]
July 25, 2012
Huge congrats to the PX4, ETH and 3DR teams for this launch, which has been the fruit of more than a year of work. Full details will come in the follow-on posts tomorrow and the rest of the week, but we think this is a game-changing platform, especially for advanced and experimental use. And although it may not be obvious from the photos in this post, but it's TINY!
3:49pm
by Andrew Tridgell [ http://diydrones.com/profile/AndrewTridgell ]
July 25, 2012
Looks great! I'm looking forward to getting ArduPlane on this.
3:55pm
by Francis Pelletier [ http://diydrones.com/profile/FrancisPelletier ]
July 25, 2012
is it replacing the APM 2 in any way? is it really better?
3:55pm
by Chris Anderson
July 25, 2012
Francis: this is aimed at a different market: research, universities and high-end performance. But ultimately, as Roberto says, we do plan to port the ArduCopter, ArduPlane, etc codebases to this hardware so people can have a choice of platforms to use, APM 2.x, 3.x (the ARM version), PX4 and others, such as Roberto's Multipilot32 [ http://www.virtualrobotix.com/page/multipilot32f4-v3-0 ] and forthcoming VR Brain platform (which uses the same ARM chip as this PX4 board) that already runs ArduCopter.
4:55pm
by ThomasB [ http://diydrones.com/profile/ThomasB ] on
July 25, 2012
If I'm right the pixhawk team is located in europe.
DIY Drones are located in the states. So if I want to order some boards, pixhawk will send them to california and from there back to europe. right?
Or in other words, will there be a direct europe distribution channel in the future?
11:31pm
by Chris Anderson
July 25, 2012
Thomas: The boards are made in the US by 3D Robotics. The regular 3DRobotics/DIY Drones distributors in Europe will be able to stock them locally.
11:35pm
by Alex [ http://diydrones.com/profile/Alex31 ]
July 26, 2012
Great work, this board looks awsome! Is this board going to actually be open hardware? IE github access to the latest design files/ BOM/ gerbers etc?? Or will it just be limited access to some files that are never updated?
Please dont get me wrong, I have no problem with either way, since there are many cloners who just replicate and give no credit to origional developers. Its just that its not truly open hardware?
1:02am
by PX4 [ http://diydrones.com/profile/PX4 ]
July 26, 2012
@Alex the design will be available shortly as fully open hardware, like almost all other 3DR products are. We just want to make sure to have everything tidy and nice for the hardware files release.
Regarding the firmware: The PX4 software stack contains two layers - the operating system and the sensor drivers and then the actual high-level autopilot code. The OS and drivers are fully operational and we have autopilot code for the AR.Drone ready, with fixed-wing to be finished shortly. In addition to that, as mentioned in previous posts, work is under way to have some well-established codebases ported to NuttX.
1:18am
by Cliff-E [ http://diydrones.com/profile/CliffW ]
July 26, 2012
This is great and a game changer.
I'm surprised the 3DR team didn't go with mass producing the MP32, VRB, or other STMF4 boards out there... Yet having the ROS interface and sensor bus logic will allow some interesting capabilities to be developed for indoor flight. And for AP and outdoor flight, I wonder how this will stack up against the AutoQuad--which I loved the fact it's been designed with EMI hardening in mind.
But nonetheless, the more FCs the better. I guess I'll start snooping around with the VRBrain this weekend.
12:49pm
by Roberto Navoni [ http://diydrones.com/profile/RoberoNavoni ]
July 26, 2012
Hi Cliff-E,
don't worry about your VBRAIN all the firmware available for PX4 will be available also for VBrain and viceversa:) We're working hard on Nuttx to activate the driver then start the application and star to fly with RTOS . The PX4 and VBrain is very similar. Based on same micro and same sensor. So the main difference is that VBRain si for Ready to Fly application ... 8 input and 8 output 3 led 1 buzzer . Then if you use serial bus or i2c you can add module .
I yet start to prepare the enviroment for PX4 for port the Arducopter32 yet available for MP32 and VBrain on It.
So the interesting news is that some people working to port OpenPilot on Vbrain and also Bill Nesbit have one to try how could work our digital sensor on his platform (AutoQuad). The Fox Team support different kind of opensource firmware based on STM32F4 micro controller on same hardware platform VBRAIN.
Today i check the Arducopter32 v 2.7 on VBrain . It work fine .... in the next days some beta tester fly it for us ;)
If you need support for the first flight contact me by skype.
Best
Roberto
1:15pm
by Cliff-E
July 26, 2012
Thanks Roberto. Sounds great. I tried email from your last comment, but it bounced--I'll use skype next time.
I was planning to try the AC32v2.6 on it (I have a modified version running DigiMesh Xbees in API mode and some other crazy stuff).
Appears everyone is going with the STMF4, which is good for us software guys--but anyone interested in investigating a SAM4S (Atmel) for a MCU?
2:02pm
by Chris Anderson
July 26, 2012
Cliff-E: APM 3.0 (out near the end of the year) will be based on the Arduino Due platform, which uses the SAM3X ARM-based Atmel chip. The plan is for ArduCopter/Plane to run on both it and PX4.
2:16pm
by Jason Beach [ http://diydrones.com/profile/JasonBeach ]
August 2, 2012
Hi - I'm trying to evaluate different autopilot platforms (APM 2.5 vs PX4 vs Paparazzi and maybe APM 3?). Couple questions:
The PX4 Autopilot platform overview view just says "video is private" when I try to view it. I'm signed in, but what else do I need to do?
APM 3.0 - Will the delays the Due is experiencing (anyone have an update on that?) cause any delays on APM 3.0? I like how well supported and relatively straightforward programming the APM 2.5 is, but our lab needs the additional processing power that the PX4 and from what I can tell the Due will have.
Any other thoughts?
2:14pm
by Chris Anderson
August 2, 2012
Jason: APM 3 does not yet have a release date (although we're targeting Q4) and will probably not run full ArduCopter/ArduPlane code at first hardware release. PX4 also does not yet have full autopilot software--it's a development environment at the moment (ArduCopter is being ported to it, but we don't have an ETA yet). I'm not sure about Paparazzi.
If you want to fly now, APM 2.5 is the best bet. It's mature hardware and software that supports all vehicles.
2:25pm
by PX4
August 2, 2012
@Jason APM3.0 (if it is ARM / Due based) will likely have slightly more complex software, so you're not necessarily better off on complexity terms. PX4 is an advanced software design, but that does not mean you have to understand it from bottom up. You just need to use the API here and there is no need to mess with the main autopilot software stack (as it is the case with bare metal designs): https://pixhawk.ethz.ch/px4/dev/shared_object_communication
11:31pm
Copyright 2012 http://diydrones.com/profiles/blogs/introducing-the-px4-autopilot-system