Team Thunder's 2014 UAV Outback Challenge
by Peter Wlodarczyk [ http://diydrones.com/profile/PeterWlodarczyk ]
DIYDrones.com
October 2, 2014
Team Thunder is a Sydney based team of RC enthusiasts who competed in this year's UAV Outback Search and Rescue Challenge in Kingaroy, Queensland, Australia, running the week of September 22-26, 2014. (http://www.uavoutbackchallenge.com.au/). The following is a description of our mission flight. A more technical report will follow.
The Flight
Friday came around and finally it was Team Thunder’s turn to find Joe.
The wind was picking up over 15 knots but we knew our X8 flying wing was up for it.
Setup went smooth enough until the GCS operator (Peter) discovered that the USB serial link to the RFD900 radio link wasn’t being recognised by the Windows GCS laptop. A reboot but Windows wouldn’t start up again. A little bit of panic and thinking “What will Tridge think of these fools who decided to rely on Windows for a mission critical device?” A quick change to Marks backup PC got things going again. Luckily Windows eventually started on the main GCS PC again so things were back on track.
A bit of a time out due to air traffic, then started again and we had the plane on the launcher at the end of setup time. David had all the flight systems up, Mark had the bungee loaded, Lloyd had the image recognition system up running and communicating over the 3G and RFD900 links. The GCS was all ready to go so the thumbs up was given to the pilot Tim pushed the lever on the launcher. 9:00am and Thunderbird 1 was away.
https://www.facebook.com/video.php?v=841139339252746
Before we knew it, the plane was passing EL1 and then EL2 into the search area. Smiles all round. This was exciting.

As there was a strong south-westerly blowing we had decided on north south runs, starting from the east to avoid overshooting downwind turns. We would be flying at 120m AGL, scanning 100m strips, leaving 50m gaps between the strips on the first pass that would be cleaned up on the second pass.
The first downwind turn was a little nerve racking but were soon at the north-eastern end of the search area and into our search runs.
Things were going well. Although it was windy and the plane was jumping around a bit, it was doing what it was meant to be doing and the upwind turns were working out ok.
Midway through the 3rd scan run and only 12 minutes into the mission, Mark called out that he had an automatic (thanks to Tridge’s algorithm) Joe position.

With a set of coordinates from Lloyd we got them away to the judges who passed on permission for us to drop the bottle.

We then passed over the Joe a number of times to get a more accurate averaged position. We uploaded the bottle drop waypoints. We were taking things very slowly and carefully now. We had heaps of battery and though the wind was strong, the X8 was handling it ok. Once we were happy we set off the sequence with a predefined routine from the GCS and the command “godrop” was given. Soon the bottle was away and Thunderbird 1 was on its way back to the airfield.

The marshals confirmed that the package separated from the aircraft ok to our relief.
3 minutes later, Thunderbird 1 was spotted approaching the airfield, ready to attempt an automatic landing. We underestimated the wind a little on our east-west landing at the end of the runway ending up in the long grass but a safe landing in one piece nonetheless.
https://www.facebook.com/video.php?v=841151805918166
The BOM recorded maximum wind for Friday was 43 km/h at 09:34. This was just as we landed.
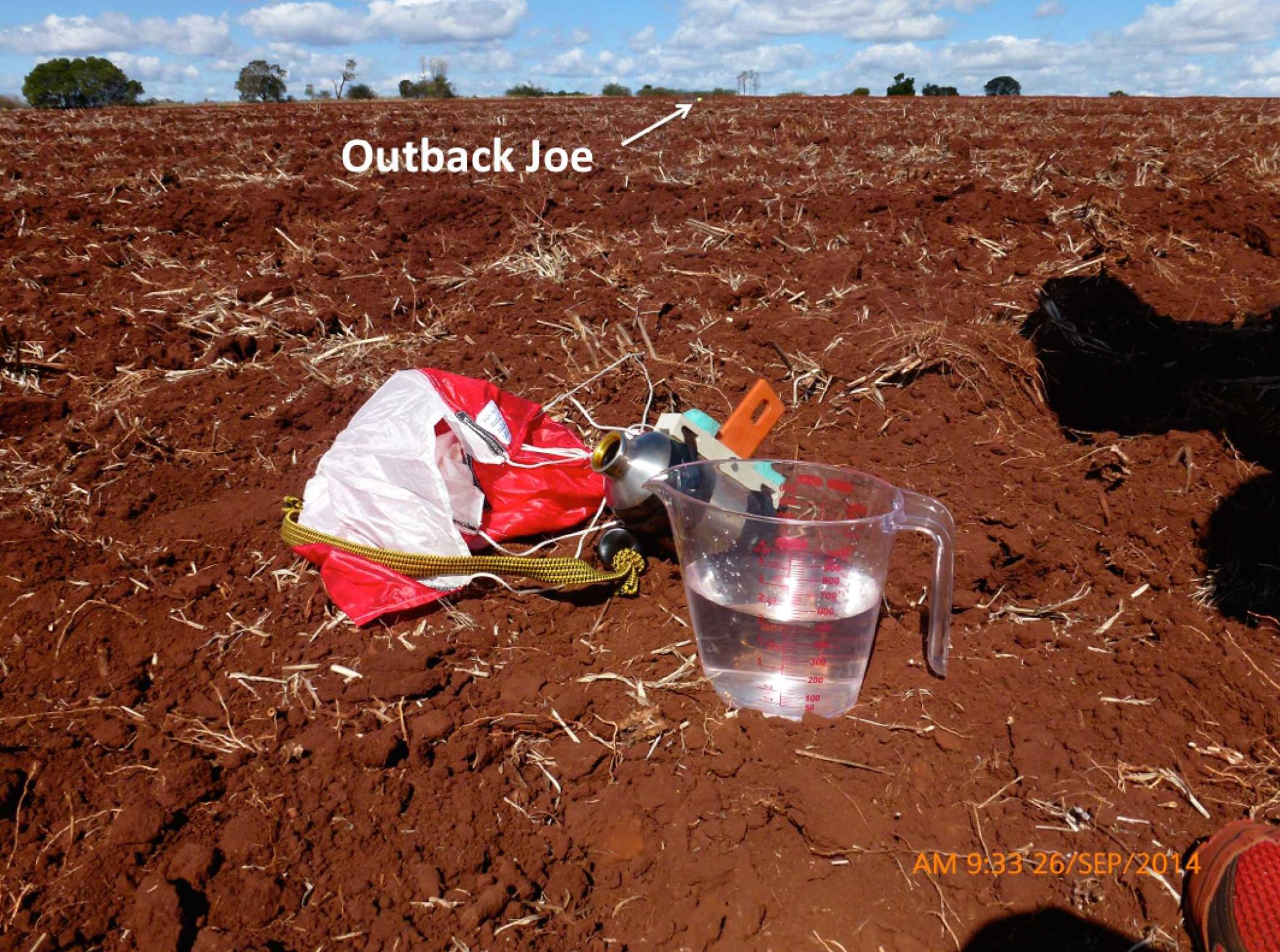
The judges confirmed we had dropped the bottle within 100m of Joe and that 500ml of water had been recovered. Mission accomplished.
More details including documents, Joe Recognition System and flight logs to follow.

Team Thunder (left to right)
Tim Fu: Pilot and airframe
Lloyd Breckenridge: Joe detection system
Peter
Wlodarczyk: Leader and software
Mark Frasca: Search, bottle drop and airframe
David Creusot: Avionics
Acknowledgements:
Andrew Tridgell and Canberra UAV: For the extraordinary open sourcing of everything they did, including APM software, MAVProxy, simulation environment, Joe recognition algorithm, RFD900 radio firmware, Joe image sets as well as advice during the course of the competition.
Michael Oborne: Developer of Mission Planner
The general Ardupilot developer community.
Orion Integration (http://www.orionintegration.com.au) : For the use of radios and camera and the tolerance of skunkworks by Lloyd.
Claudio Natoli: For the kind loan of a failsafe board.
Millswood Engineering (http://www.millswoodeng.com.au): For the design and kind donation of a spare failsafe board.
Seppo at RFDesign (http://rfdesign.com.au): For an awesome RFD900 radio design and advice.
Hawkesbury Model Air Sports (HMAS) Club (http://www.hmas.org.au): Support, encouragement and an excellent field at Vineyards.
6:07pm
by Andrew Tridgell [ http://diydrones.com/profile/AndrewTridgell ]
October 2, 2014
great stuff! I was so delighted when you guys completed the challenge. An X8 is a much more practical plane for real S&R than our aircraft was, as it can be launched/landed anywhere.
Do you guys have any plans on what you might do next?
8:48pm
by Peter Wlodarczyk
October 2, 2014
Thanks Tridge. Our success was substantially due to your efforts.
What I am very happy with is that we demonstrated that the Ardupilot platform is at the stage where only a modest amount of effort is required to develop and deploy a practical S&R system. I was pleasantly surprised just how well it worked in what I thought was pretty challenging conditions. The Ardupilot controlled the plane well, MAVProxy/Mission Planner allowed us to plan, configure monitor the plane the system fairly easily and your image recognition algorithm was very adaptable to our platform.
Our team member Lloyd has plans to get web browser based squinting interface that he developed for the challenge, up on a Amazon server for everyone to play around with.
There are glimpses that this kind of system could be an affordable, viable ancillary capability of professional civilian agencies such as fire brigades or emergency and rescue services and possibly even volunteer emergency organisations such as you'd find in the Australia Outback.
As for what next... at the moment we probably have a bit of family catch-up to do and after all the focus of the Outback Challenge, we've also got a fair bit of pent-up free RC plane flying to vent.
After that, I'm not sure. Even though our expertise rose greatly during the OBC I still feel we were playing catchup with you guys at Canberra UAV. Some kind of collaboration with your group and some of the other groups around Sydney may be productive.
9:41pm
Copyright 2014 http://diydrones.com/profiles/blogs/team-thunder-s-2014-uav-outback-challenge